Parte I — Fundamentos de Robótica#
Capítulo 1 — Introdução à Robótica#
1.1 Definição de Robótica#
A robótica é um campo interdisciplinar que integra conhecimentos de engenharia mecatrônica com o objetivo de conceber, desenvolver e operar sistemas capazes de executar tarefas de forma automática ou semiautomática. Tais sistemas, denominados robôs, caracterizam-se pela capacidade de perceber o ambiente, processar informações e atuar sobre ele de maneira controlada.
Do ponto de vista sistêmico, um robô pode ser compreendido como um sistema de controle em malha fechada, no qual três funções fundamentais se articulam:
Função |
Descrição |
Componente típico |
|---|---|---|
Percepção |
Aquisição de dados do ambiente |
Sensores |
Decisão |
Processamento e planejamento de ação |
Microcontrolador / Computador |
Atuação |
Execução da ação no ambiente físico |
Motores, servos, atuadores |
1.2 Classificação dos Robôs#
Os robôs podem ser classificados segundo diferentes critérios: pela aplicação, pela morfologia (forma física) ou pelo grau de autonomia. A seguir, apresentam-se as principais categorias segundo a aplicação.
1.2.1 Robôs Educacionais#
São desenvolvidos com fins didáticos, priorizando modularidade, baixo custo e facilidade de programação. Têm papel fundamental na introdução de conceitos de lógica, eletrônica e programação em diferentes níveis de ensino.
Exemplos:
Robôs de seguimento de linha
Plataformas bípedes como o Otto
Kits de robótica como LEGO Mindstorms e Arduino
Destaque — Robô Otto Bípede
O Otto é um robô educacional bípede de código aberto (open source) amplamente utilizado em ambientes de aprendizagem. Sua estrutura simples e personalizável o torna ideal para ensinar conceitos de robótica, eletrônica e programação de forma prática e lúdica.
Componentes principais do Otto:
Microcontrolador: Arduino Nano ou Uno
Atuação: 4 servomotores (2 nos quadris, 2 nos tornozelos)
Detecção: Sensor ultrassônico HC-SR04 (medição de distância)
Comunicação: Buzzer para sons, matriz de LEDs opcional
Estrutura: Corpo impresso em 3D (partes disponíveis em arquivo aberto)

Robô Otto Bípede: estrutura bípede com 4 servomotores
1.2.2 Robôs Industriais#
Empregados em ambientes produtivos, destacam-se pela elevada precisão, repetibilidade e robustez. Operam geralmente em células de manufatura isoladas, executando tarefas repetitivas com alta confiabilidade e velocidade.
Exemplos:
Manipuladores robóticos (braços industriais)

Robô manipulador
Robôs de soldagem e pintura
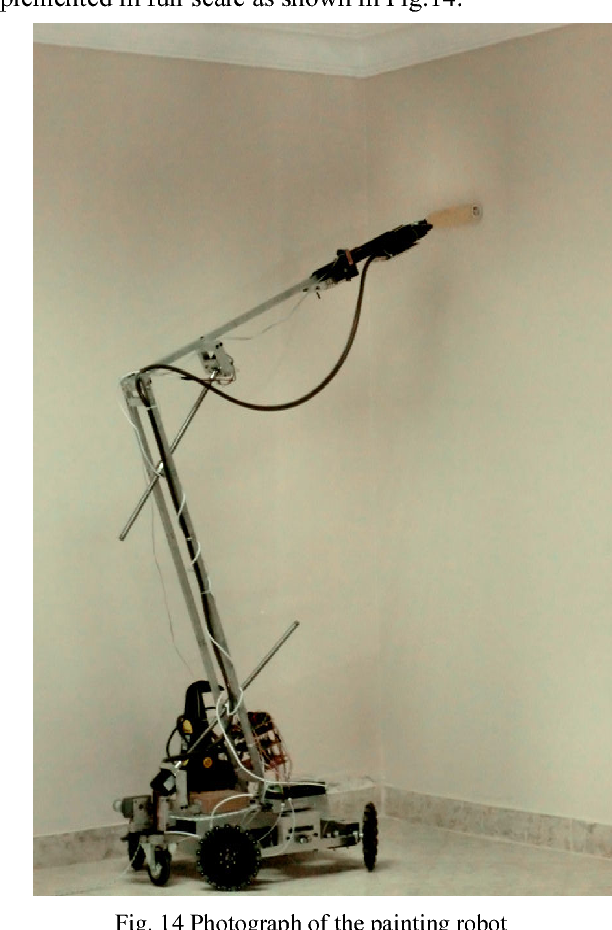
Robô de pintura de paredes
Robôs colaborativos (cobots) que operam ao lado de humanos

Robô colaborativo
Características técnicas típicas:
Graus de liberdade (DOF)
Carga útil
Repetibilidade
1.2.3 Robôs de Serviço#
Os robôs de serviço constituem uma das categorias de maior crescimento na robótica contemporânea. Ao contrário dos robôs industriais, que operam em ambientes estruturados, os robôs de serviço atuam em ambientes dinâmicos e não estruturados, interagindo diretamente com pessoas ou executando tarefas em locais de difícil acesso.
A norma ISO 8373 define robô de serviço como: “robô que realiza tarefas úteis para humanos ou equipamentos, excluindo aplicações de automação industrial”.
Subcategorias de robôs de serviço:
Subcategoria |
Aplicação |
Exemplos |
|---|---|---|
Domésticos |
Tarefas do lar |
Roomba (aspirador), cortadores de grama autônomos |
Médicos/Cirúrgicos |
Assistência e cirurgia |
Da Vinci Surgical System, exoesqueletos de reabilitação |
Logística |
Movimentação de carga |
AMRs em armazéns (Amazon Robotics, Locus Robotics) |
Inspeção e manutenção |
Monitoramento de infraestrutura |
Drones de inspeção de pontes, robôs em tubulações |
Segurança |
Vigilância e emergências |
Robôs de patrulha, de combate a incêndio |
Sociais/Assistivos |
Interação com pessoas |
NAO, Pepper, robôs de companhia para idosos |
Agrícolas |
Automação no campo |
Robôs de colheita, pulverização por drone |
Construção civil |
Obras e inspeção |
Robôs de alvenaria (SAM100), drones topográficos |
Destaque — Robôs de Serviço na Construção Civil
Na engenharia civil, robôs de serviço têm sido aplicados em:
Inspeção de estruturas: drones com câmeras termográficas e sensores avaliam fissuras em pontes, viadutos e fachadas sem expor trabalhadores a riscos.
Mapeamento topográfico: VANTs equipados com LiDAR geram modelos 3D de terrenos e obras em fração do tempo necessário por equipes convencionais.
Alvenaria automatizada: o robô SAM100 (Semi-Automated Mason) assenta até 3.000 tijolos por dia, reduzindo custos e riscos ergonômicos.
Monitoramento de obras: o robô Spot (Boston Dynamics) captura periodicamente o progresso da obra e compara com o modelo BIM, detectando desvios.
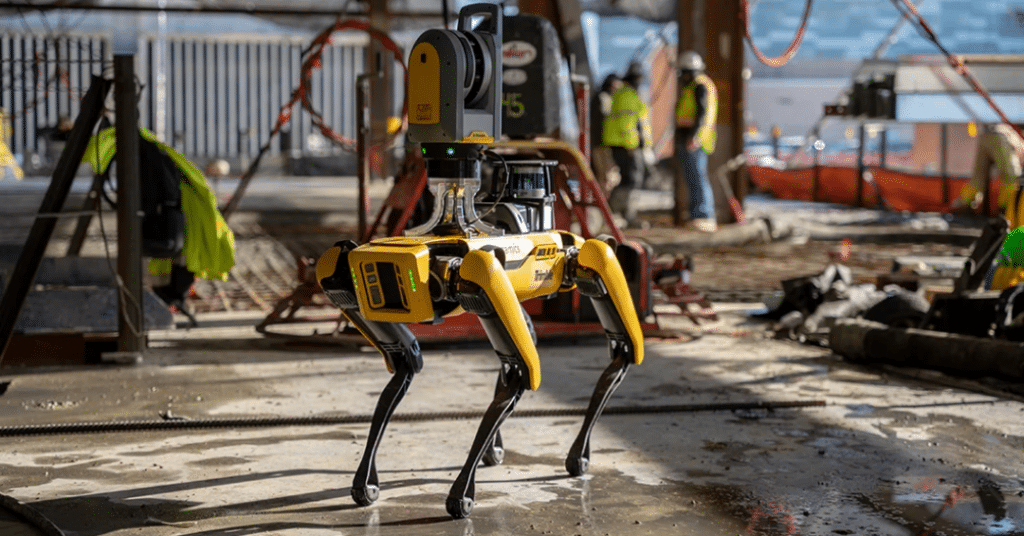
Spot dogbot
1.2.4 Robôs Autônomos#
Capazes de operar com reduzida ou nenhuma intervenção humana, tomando decisões em tempo real com base em dados do ambiente. Utilizam algoritmos de inteligência artificial, visão computacional e planejamento de trajetória.
Exemplos:
Veículos autônomos (carros self-driving)
Robôs de exploração espacial (Mars Rover — Perseverance)
TurtleBot3 — plataforma educacional de robótica autônoma baseada em ROS
Destaque — TurtleBot3 Burger
O TurtleBot3 Burger é uma plataforma robótica autônoma amplamente utilizada em pesquisa e educação avançada. Baseia-se no framework ROS (Robot Operating System) e integra:
LiDAR 360° para mapeamento e navegação (SLAM)
Raspberry Pi como computador de bordo
OpenCR (ARM Cortex-M7) para controle dos motores
DYNAMIXEL x2 para acionamento das rodas
1.2.5 Robôs Colaborativos (Cobots)#
Os cobots (collaborative robots) são projetados para trabalhar em conjunto com seres humanos no mesmo espaço de trabalho, com sistemas de segurança avançados que permitem interação direta sem a necessidade de grades de proteção.
Características:
Detecção de colisão por sensores de força/torque
Programação intuitiva por demonstração (teach by demonstration)
Alta flexibilidade para diferentes tarefas
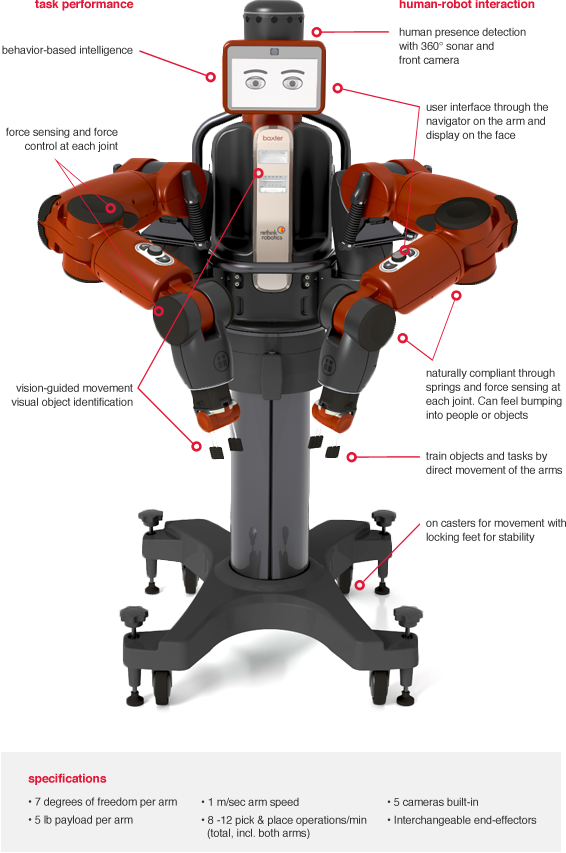
Exemplos: Universal Robots UR3/UR5/UR10, KUKA LBR iiwa, Rethink Robotics Baxter.
Spot dogbot
1.2.6 Robôs Militares e de Segurança Pública#
Desenvolvidos para atuação em ambientes de alto risco, executam tarefas de reconhecimento, desarmamento de explosivos (EOD), vigilância e apoio a operações em locais perigosos para humanos.
Exemplos: PackBot (iRobot), BigDog (Boston Dynamics), drones de reconhecimento tático.
1.3 Classificação por Morfologia#
Além da classificação por aplicação, os robôs também podem ser classificados pela sua forma física (morfologia):
Tipo |
Locomoção |
Características |
|---|---|---|
Manipuladores |
Base estacionária |
Braços articulados, alta precisão |
Móveis com rodas |
Rodas |
Eficiência em superfícies planas |
Móveis com esteiras |
Esteiras |
Melhor tração em terrenos irregulares |
Bípedes |
2 pernas |
Navegação em ambientes projetados para humanos |
Quadrúpedes |
4 pernas |
Estabilidade em terrenos complexos |
Aéreos (drones/VANTs) |
Hélices / asas |
Cobertura aérea, inspeção, mapeamento |
Aquáticos/Submarinos |
Propulsores |
Exploração subaquática, inspeção de estruturas |
1.4 Estrutura de um Sistema Robótico#
Um sistema robótico pode ser descrito por um modelo em malha fechada composto pelos seguintes blocos funcionais:
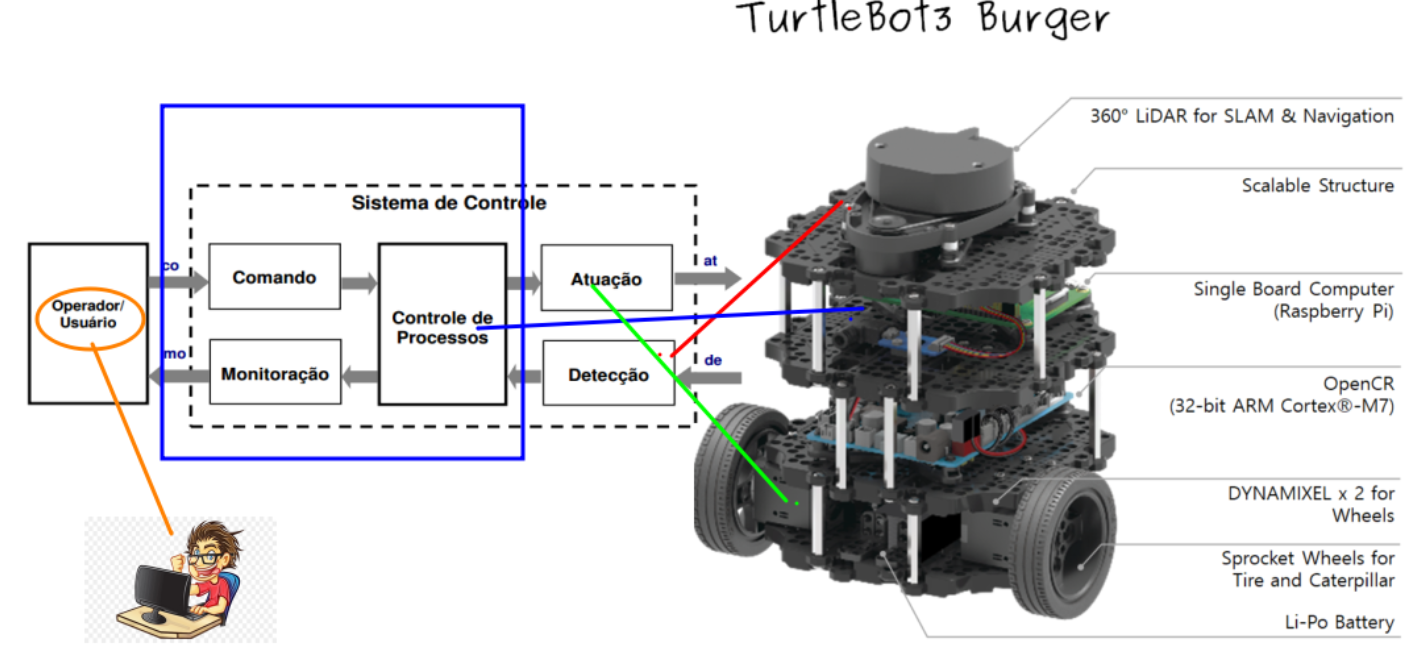
Diagrama de um sistema de controle de um sistema robótico (baseado no TurtleBot3 Burger)
Bloco |
Função |
Exemplo (TurtleBot3) |
Exemplo (Otto Bípede) |
|---|---|---|---|
Operador/Usuário |
Define objetivos e fornece entradas |
Desenvolvedor ROS |
Programador Arduino |
Comando |
Instruções do sistema |
Pacotes ROS (tópicos/serviços) |
Código embarcado (.ino) |
Controle de Processos |
Processamento e tomada de decisão |
Raspberry Pi + OpenCR |
Arduino Nano |
Detecção |
Aquisição de dados por sensores |
LiDAR 360° |
Sensor ultrassônico HC-SR04 |
Atuação |
Execução física por atuadores |
DYNAMIXEL (rodas) |
4 servomotores (pernas) |
Monitoração |
Retorno de dados ao operador |
Interface RViz |
Serial Monitor / LEDs |
O sistema opera em ciclo contínuo:
Perceber ──► Decidir ──► Agir ──► Monitorar ──► (repete)
▲ │
└───────────────────────────────────┘
Realimentação
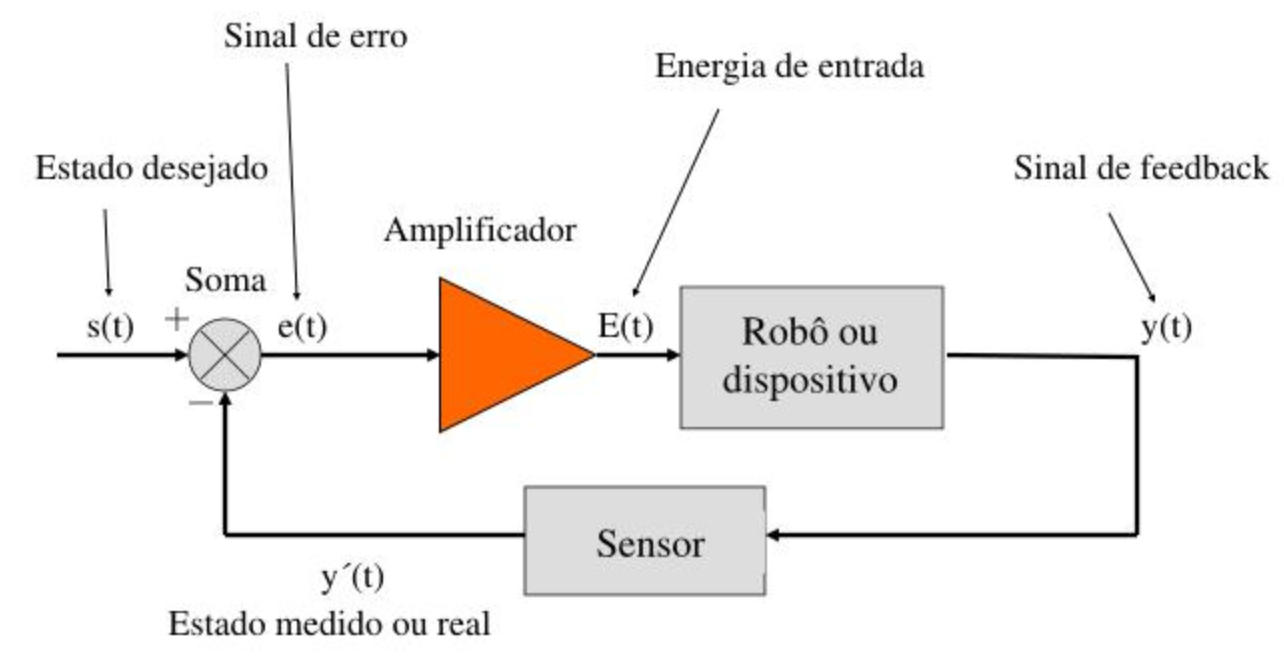
Malha fechada de um sistema robótico
1.5 Estudo de Caso — Robô Otto Bípede#
O Otto é uma excelente plataforma para compreender os fundamentos de robótica de forma prática. Sua simplicidade construtiva permite mapear diretamente cada componente físico a um bloco do diagrama de controle.
1.5.1 Estrutura Física#
Peças principais (todas impressas em 3D):
Cabeça — aloja o sensor ultrassônico HC-SR04 e a matriz de LEDs
Corpo — comporta o Arduino, a bateria e o buzzer
Pernas (esquerda/direita) — conectadas aos servomotores dos quadris
Pés (esquerdo/direito) — conectados aos servomotores dos tornozelos
1.5.2 Funcionamento — Marcha Bípede#
O Otto realiza locomoção bípede por meio da coordenação de 4 servomotores, simulando o padrão natural de caminhada:
Fase de apoio: um pé permanece fixo no chão como base de suporte
Fase de balanço: o pé oposto avança para a próxima posição
Transferência de peso: o quadril inclina lateralmente para manter o equilíbrio
1.5.3 Exemplo Prático — Desvio de Obstáculo#
O trecho abaixo ilustra como os blocos do diagrama de malha fechada se traduzem em código:
#include <Otto.h>
Otto Otto;
#define TRIGGER_PIN 8
#define ECHO_PIN 9
void setup() {
// Inicializa servos (pinos) + sensor ultrassônico
Otto.init(7, 6, 5, 4, true, A6, TRIGGER_PIN, ECHO_PIN);
}
void loop() {
int distancia = Otto.getDistance(); // [DETECÇÃO] lê sensor ultrassônico
if (distancia < 15) { // [CONTROLE] obstáculo a menos de 15 cm
Otto.sing(S_surprise); // [ATUAÇÃO] emite som de alerta
Otto.walk(2, 1000, BACKWARD); // [ATUAÇÃO] recua 2 passos
Otto.turn(3, 1000, LEFT); // [ATUAÇÃO] gira à esquerda
} else {
Otto.walk(1, 1000, FORWARD); // [ATUAÇÃO] avança normalmente
}
}
Explicação do Código — Otto Bípede: Desvio de Obstáculo#
Cabeçalho e configurações globais
#include <Otto.h>
Importa a biblioteca Otto, que contém todas as funções prontas para controlar os servomotores, sensor e buzzer do robô.
Otto Otto;
Cria um objeto chamado Otto do tipo Otto. É como “instanciar” o robô no código — a partir daqui, tudo é controlado por meio desse objeto.
#define TRIGGER_PIN 8 e #define ECHO_PIN 9
Definem constantes para os pinos do sensor ultrassônico HC-SR04. TRIGGER_PIN (pino 8) envia o pulso sonoro e ECHO_PIN (pino 9) recebe o eco de volta. Usar #define evita números “mágicos” espalhados pelo código.
Função setup() — executa uma única vez ao ligar
Otto.init(7, 6, 5, 4, true, A6, TRIGGER_PIN, ECHO_PIN)
Inicializa todos os componentes do Otto. Os parâmetros, na ordem, são:
Parâmetro |
Valor |
Significado |
|---|---|---|
Pino servo perna esquerda |
|
Controla a perna esquerda |
Pino servo perna direita |
|
Controla a perna direita |
Pino servo pé esquerdo |
|
Controla o pé esquerdo |
Pino servo pé direito |
|
Controla o pé direito |
Buzzer ativado |
|
Habilita o buzzer para sons |
Pino do buzzer |
|
Pino analógico onde o buzzer está conectado |
Trigger do sensor |
|
Pino de disparo do ultrassônico |
Echo do sensor |
|
Pino de retorno do ultrassônico |
Função loop() — repete continuamente enquanto o robô está ligado
int distancia = Otto.getDistance();
Aciona o sensor ultrassônico, mede o tempo que o pulso leva para voltar e retorna a distância em centímetros. O valor é armazenado na variável inteira distancia. Este é o bloco de Detecção.
if (distancia < 15)
Verifica se há um obstáculo a menos de 15 cm. Se verdadeiro, o robô executa a rotina de desvio. Este é o bloco de Controle de Processos — a tomada de decisão.
Otto.sing(S_surprise);
Aciona o buzzer para emitir o som predefinido S_surprise da biblioteca. Serve como alerta sonoro ao detectar o obstáculo.
Otto.walk(2, 1000, BACKWARD);
Faz o Otto dar 2 passos para trás, com 1000 ms de duração cada. Os três parâmetros são: número de passos, velocidade em milissegundos e direção (BACKWARD).
Otto.turn(3, 1000, LEFT);
Faz o Otto executar 3 passos de giro para a esquerda, com 1000 ms cada, desviando do obstáculo.
Otto.walk(1, 1000, FORWARD);
Se não há obstáculo (distância ≥ 15 cm), o Otto dá 1 passo para frente a cada ciclo do loop, seguindo em linha reta normalmente.
Resumo do fluxo: a cada ciclo, o sensor mede a distância → o Arduino decide → os servos atuam. Esse é exatamente o ciclo Perceber → Decidir → Agir do diagrama de malha fechada.
Mapeamento com o diagrama de malha fechada:
Linha de código |
Bloco do diagrama |
|---|---|
|
Detecção — sensor ultrassônico mede a distância |
|
Controle de Processos — decisão no microcontrolador |
|
Atuação — servomotores executam o movimento |
Nova posição física do robô |
Monitoração — realimentação ao próximo ciclo |
1.6 Aplicações na Engenharia#
1.6.1 Engenharia Civil#
A robótica tem transformado profundamente o setor da construção civil, trazendo ganhos expressivos em segurança, produtividade e qualidade. As principais aplicações incluem:
a) Inspeção e monitoramento de estruturas
Drones e robôs terrestres equipados com câmeras de alta resolução, sensores termográficos e LiDAR permitem inspecionar pontes, viadutos, torres de transmissão e fachadas de edifícios sem expor trabalhadores a riscos.
Drones com LiDAR: geram nuvens de pontos 3D para detecção de fissuras e deformações estruturais
Robôs escaladores: inspecionam superfícies verticais com câmeras e sensores termográficos
b) Levantamento topográfico automatizado
VANTs equipados com GPS/RTK e câmeras fotogramétricas realizam mapeamentos de terreno em frações do tempo necessário por equipes convencionais, gerando:
Modelos Digitais de Terreno (MDT)
Ortofotos de alta resolução
Modelos 3D de obras em andamento integrados ao BIM
c) Automação de alvenaria e estruturas
Robô |
Função |
Produtividade |
|---|---|---|
SAM100 (Construction Robotics) |
Assentamento de tijolos |
~3.000 tijolos/dia |
Hadrian X (FBR) |
Alvenaria automatizada |
~200 blocos/hora |
TyBot (Advanced Construction Robotics) |
Amarração de ferragem |
~1.100 amarrações/hora |
d) Monitoramento de progresso de obras
O robô Spot (Boston Dynamics) tem sido adotado em canteiros para captura periódica do estado da obra, comparação com o modelo BIM e identificação automática de não-conformidades.
e) Impressão 3D de estruturas de concreto
Impressoras 3D robóticas de concreto já produzem estruturas habitacionais completas em menos de 24 horas, além de pontes peatonais e elementos arquitetônicos de geometria complexa, antes inviáveis por métodos convencionais.
1.6.2 Engenharia Elétrica#
Controle e automação: PLCs, sistemas SCADA e robôs industriais em plantas de geração e distribuição de energia
Inspeção de redes elétricas: drones para inspeção de linhas de transmissão em alta tensão sem interrupção do serviço
Sistemas embarcados: desenvolvimento de controladores como Arduino, Raspberry Pi e ESP32 para robôs educacionais e industriais
Cobots em montagem eletrônica: robôs colaborativos para soldagem SMD e inspeção óptica de PCBs
1.6.3 Engenharia Mecânica#
Manufatura: robôs para manufatura aditiva metálica (impressão 3D de metal), usinagem CNC robótica e forjamento
Dinâmica e cinemática: modelagem de manipuladores, análise de trajetórias e controle de movimento
Projeto de mecanismos: juntas, transmissões, sistemas de acionamento pneumático, hidráulico e elétrico
Manutenção preditiva: robôs de inspeção interna de tubulações (robôs pig inteligentes) para detecção de corrosão